← 記事一覧に戻る

RecoverFormer: End-to-End Recovery Policy for Humanoid Robots Learns to Switch Among Multiple Stabilization Strategies
arXiv cs.RO (Robotics) · 2026年4月28日
AI要約
- •Researchers present RecoverFormer, a fully end-to-end humanoid recovery policy that learns when and how to switch among recovery behaviors—including compensatory stepping, hand-environment contact, and center-of-mass reshaping—while maintaining robust performance under model mismatch.
- •The architecture combines a causal transformer over a 50-step observation history with a latent recovery mode (enabling smooth transitions among distinct recovery strategies) and a contact affordance head (predicting which environmental surfaces like walls, railings, and table edges are beneficial for stabilization).
- •When trained only on open floor and tested on Unitree G1 humanoid in MuJoCo, RecoverFormer transfers zero shot to walled environments, achieving 100% recovery success across 100–300 N pushes and across wall distances from 0.25–1.4m. Under zero-shot dynamics mismatch, it reaches 75.5% at plus +25% mass, 89% under 30 ms latency, 91.5% at low friction, and 99% under compound friction, latency and mass perturbation.
関連記事
大規模言語モデル
Atlassianが2026年4月にGoogle Cloudとの多年パートナーシップを拡大し、Gemini 3 FlashモデルとGoogle Workspaceの深い統合によってRovo AIプラットフォームを強化
Yahoo Finance AI·2026年4月28日
大規模言語モデル
OpenAI loosens Microsoft exclusivity to distribute via Google TPU and AWS; Xiaomi open-sources MiMo-V2.5 with 1M-token context; Sakana's 7B Conductor orchestrates frontier models to reach 83.9% on LiveCodeBench.
Latent Space·2026年4月28日
大規模言語モデル
Article body unavailable — unable to generate summary
Hacker News·2026年4月28日
大規模言語モデル
QuickDef:GPT-4o-miniを使い文脈に応じた定義を提供するChrome拡張機能
Hacker News·2026年4月28日
大規模言語モデル
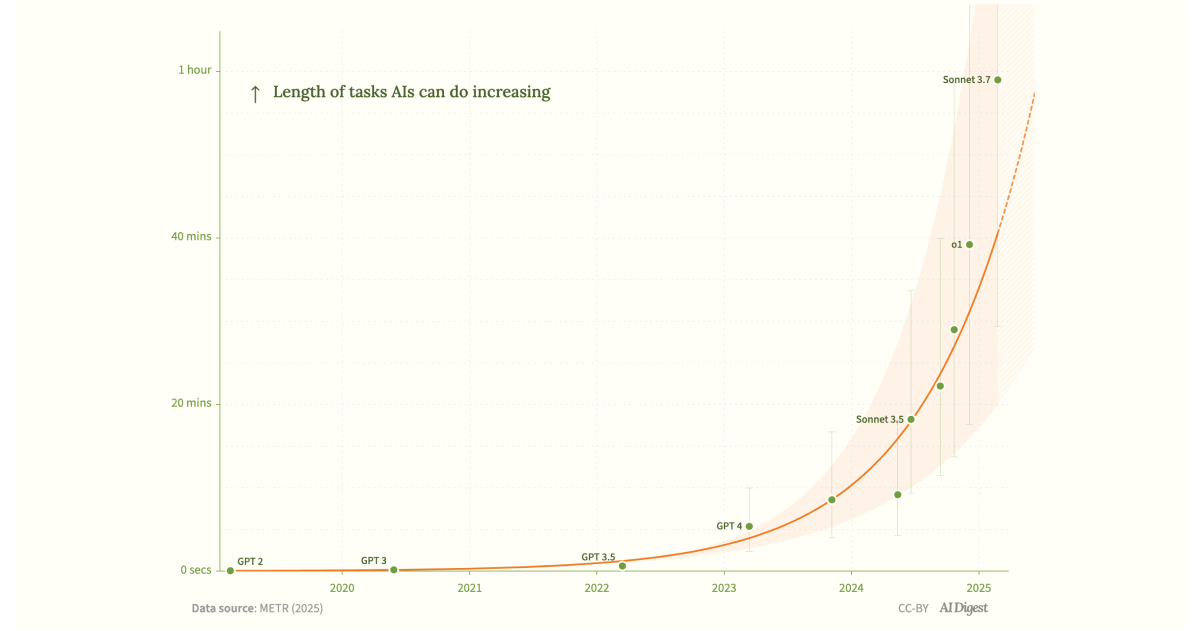
AI agents' task complexity is doubling every 4 months, with time horizons growing exponentially from 30 seconds in 2022 to 14+ hours today
Hacker News·2026年4月28日
AIニュースを毎日お届け
200以上のソースから厳選したAIニュースを毎日無料でお届けします。
無料で始める